
3D scanner for modular capture, reconstruction and evaluation
Modular 3D scanner for reproducible 3D data
The Dat-inf 3D scanner is designed as a modular multi-camera system and is suitable for applications in which objects, components or surfaces are to be captured as precise 3D data and then evaluated. The goal is not only a visually appealing reconstruction, but a reliable data basis for analysis, measurement, documentation and quality assessment.
Thanks to its modular design, the scanner can be adapted to different tasks – from a compact inspection station to a larger measurement cell. This makes the system suitable both for development and research environments and for technical applications in which geometry, shape, position or surface structures are to be captured reproducibly.
Typische Einsatzfelder
- 3D measurement of components, samples and objects
- Generation of meshes for analysis, visualization or further processing
- Comparison of geometries against target states or reference data
- Capture of complex shapes with multiple camera perspectives
- Documentation of object states and surfaces
What matters in this solution
- Modular design instead of rigid single-purpose hardware
- Scalability through freely combinable stereo modules
- Software-supported reconstruction with an MVS toolchain
- Further processing of 3D data with custom software
- Adaptability to object size, accuracy and process environment
Modular camera concept with freely positionable stereo modules
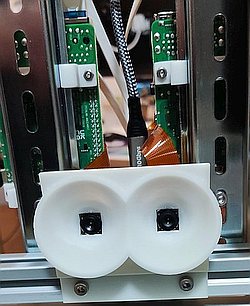
We use Raspberry Pi computers with 64-megapixel camera modules as sensor units. Two cameras form one stereo module. These modules can be mounted flexibly using industrial profiles and 3D-printed adapters and combined into larger camera arrays. This creates a 3D scanner that adapts to the measurement task, rather than forcing the measurement task to adapt to rigid hardware.



The number and geometry of the modules can be selected depending on the object shape, field of view and target accuracy. This is particularly important when hard-to-reach areas need to be captured or when an object should be visible from multiple viewing angles.
The mechanically stable integration and defined camera position create a reliable basis for later reconstruction. It is exactly this combination of setup, calibration and software that determines whether a 3D scanner really delivers reproducible results in everyday use.
- Scalable: number and arrangement of stereo modules can be configured for the task
- Flexibly integrable: mounting via industrial profiles and 3D-printed holders
- Can be designed for stability: suitable for defined, reproducible camera positions
- Expandable: camera array can be adapted to new tasks
What matters for robust 3D reconstruction
The 3D data is created from the images of the multi-camera rig through multi-view 3D reconstruction. For this process to work reliably, both the setup and the object itself must meet certain prerequisites.
Geometric prerequisites
- Multiple visibility: each relevant object point should be captured by at least three cameras
- Sufficient overlap: the perspectives must contain enough shared image areas
- Stable calibration: camera position and geometry must be reproducibly known
- Suitable resolution: object size, distance and optics must match
Surface and material
- Structured surfaces significantly facilitate image matching
- Smooth or homogeneous surfaces often provide too few distinctive features
- Reflective materials can make reconstruction more difficult
- Supporting measures such as matting, projected patterns or speckle texture can be useful
That is exactly why we never look only at camera hardware in 3D projects. What is always decisive is the interaction of object, surface, lighting, camera arrangement, calibration and evaluation. If required, we assess these points in advance as part of a feasibility study.
Software pipeline: from image capture to mesh
For reconstruction, we rely on an MVS toolchain (multi-view stereo). Image capture takes place with the camera modules, controlled via a Windows computer. Exposure and focus settings can be adjusted in software. The computationally intensive reconstruction then runs on a powerful PC with an NVIDIA GPU.
- Setup and alignment of the camera and stereo modules
- Calibration and capture of the object
- Transfer of the image data to the reconstruction PC
- 3D reconstruction via the MVS toolchain
- Generation of a mesh file for analysis or further processing
- Optional evaluation with custom software
The result is not just a 3D model, but a data basis for downstream steps such as geometry comparison, surface analysis, position assessment or quality evaluation. This makes the 3D scanner part of a technical process and not merely a visualization tool.
Especially in combination with custom software, 3D data can be processed further in a targeted way, compared with references or integrated into larger inspection and documentation processes.
Practical use cases for the 3D scanner
3D capture for geometry and shape analysis
When complex components or samples need to be captured from multiple viewing angles, a modular 3D scanner provides a significantly better data basis than individual cameras or isolated depth sensors. The resulting meshes can then be measured, compared or documented.
Multiple camera perspectives instead of a single depth capture
For larger or geometrically challenging objects, a single view is often not enough. Multiple camera perspectives help capture obscured areas better and produce a more reliable reconstruction.
3D data as the basis for custom evaluation
The 3D scanner becomes particularly interesting when the reconstructed data is not only stored, but also technically evaluated – for example to derive dimensions, positional relationships, surface features or deviations from reference data.
Connection to our other solutions
The 3D scanner does not stand alone, but complements our topics around 3D machine vision, camera-based measurement systems and machine vision. This allows 3D data to be integrated directly into analysis and inspection environments.
Combination with existing systems is also possible – for example as part of a retrofit, when additional optical capture or software-supported evaluation is to be integrated into existing workflows.
Frequently asked questions about the 3D scanner
What is a modular 3D scanner particularly suitable for?
Especially when objects are to be captured from several directions and further processed as reliable 3D data – for example for measurement, comparison, documentation or analysis.
Why are multiple cameras useful?
Multiple cameras increase the visibility of relevant object areas and improve the basis for reconstruction. This is especially important for complex geometries or partially obscured structures.
What output does the 3D scanner generate?
Typically, a mesh file is generated, which can then be visualized, evaluated or transferred into further software processes.
Can the system be adapted to a specific task?
Yes. That is exactly a central advantage of the modular design. The number, arrangement and integration of the camera modules can be tailored to the object, accuracy requirements and process environment.
Interested in a 3D scanner for your application?
We would be happy to discuss with you which camera configuration, viewing geometry and reconstruction strategy make sense for your use case – including an assessment of resolution, data quality and further processing.